Appearance
HOS Studio
什么是HOS Studio?
HOS(Humanoid Operating System) Studio是助力人形机器人开发的一站式开发云平台,基于DevOps理念涵盖模型训练、技能开发、仿真测试、缺陷管理、实机部署、监控运维、生态社区等全流程功能
能带来什么好处?
- 开箱即用的开发环境
- 支持企业级多人协作
- 开发成果模块化复用
- 完全内置的版本管理
- 插件系统及开发环境
- DevOps CI/CD
- 开放共建的生态社区
登录
可新注册用户,登录HOS平台 
检查设备
进入“设备/机器人管理”页面,选择“真实设备”,点击右侧“刷新设备列表”按钮,查看待控制的机器人控制器是否在线 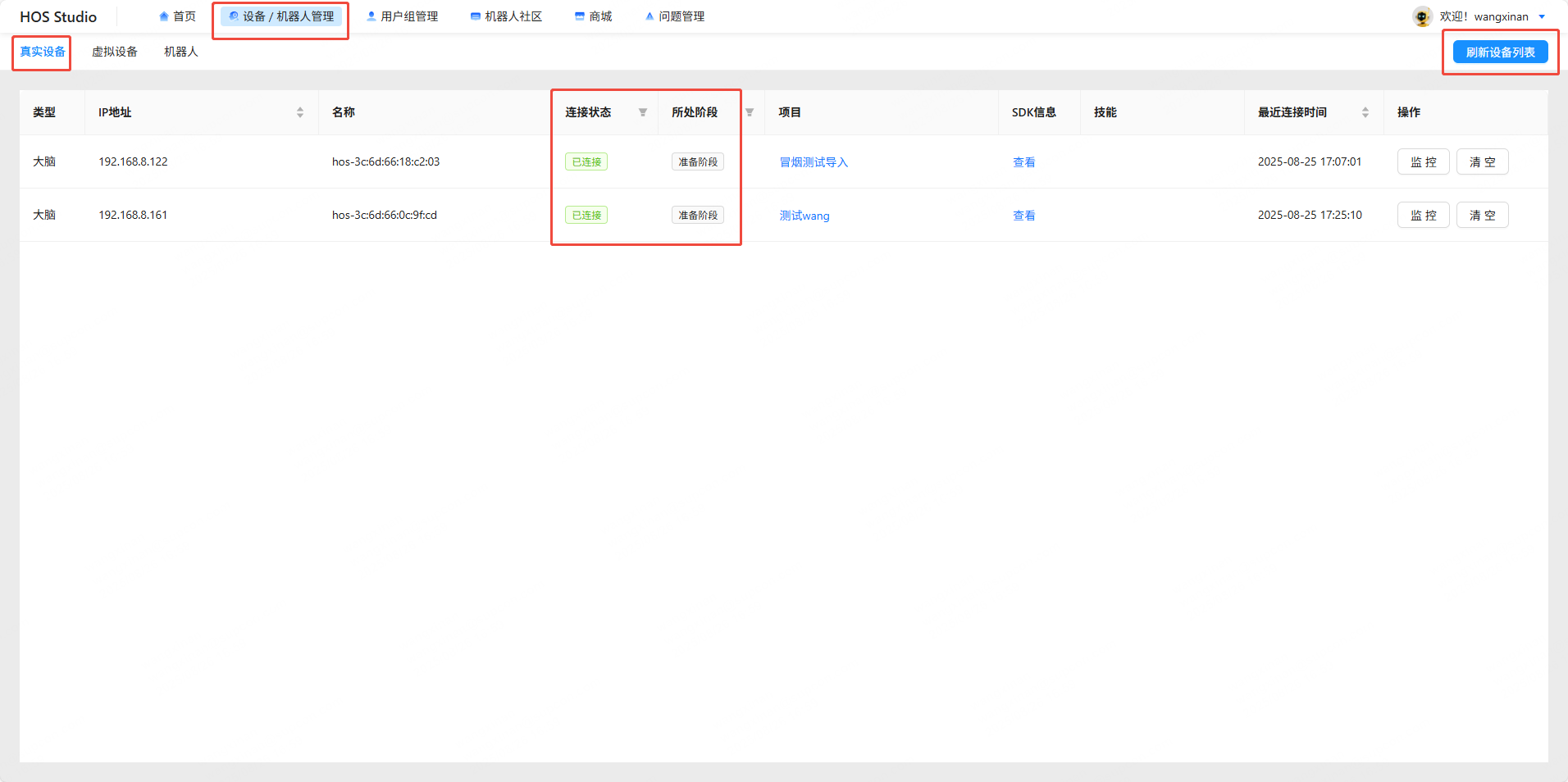
新建机器人及SDK
选择“机器人开发”,点击右侧“添加机器人”,填入信息
新建项目
- 回到首页,点击新建项目,填写基本信息后,选择上一步新建的机器人和SDK,
- 选择项目要绑定的设备,绑定之后该项目内的技能开发环境会直接在此设备内运行,
- 选择项目要绑定的设备,绑定之后该项目内的技能开发环境会直接在此设备内运行,
- 可以直接导入项目资源
技能编排
打开项目后默认进入技能编排页面,左侧节点栏会自动生成内置节点: 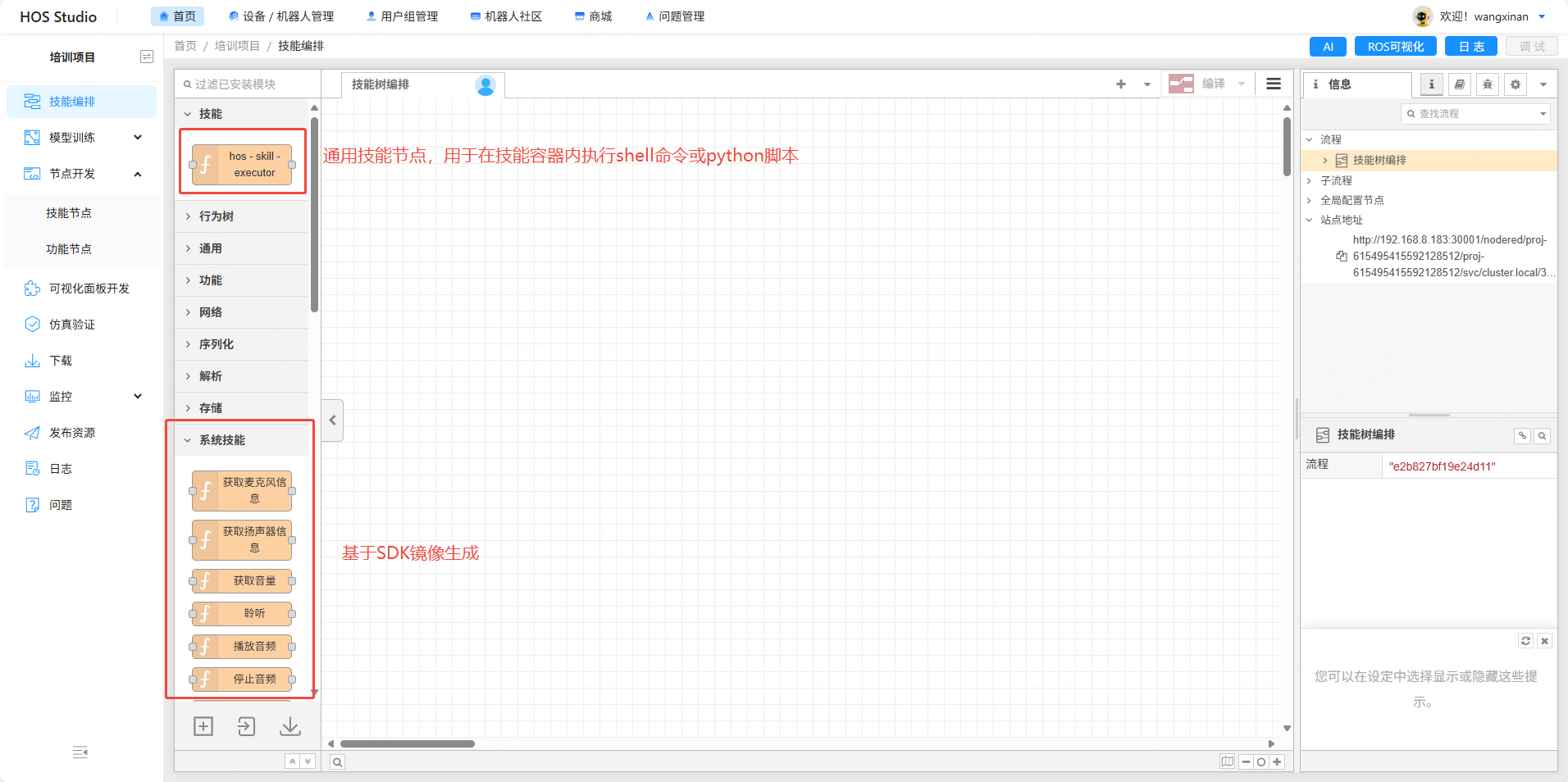 直接拖拽相应节点到画布上部署后即可直接使用(具体用法参见技能编排):
直接拖拽相应节点到画布上部署后即可直接使用(具体用法参见技能编排): 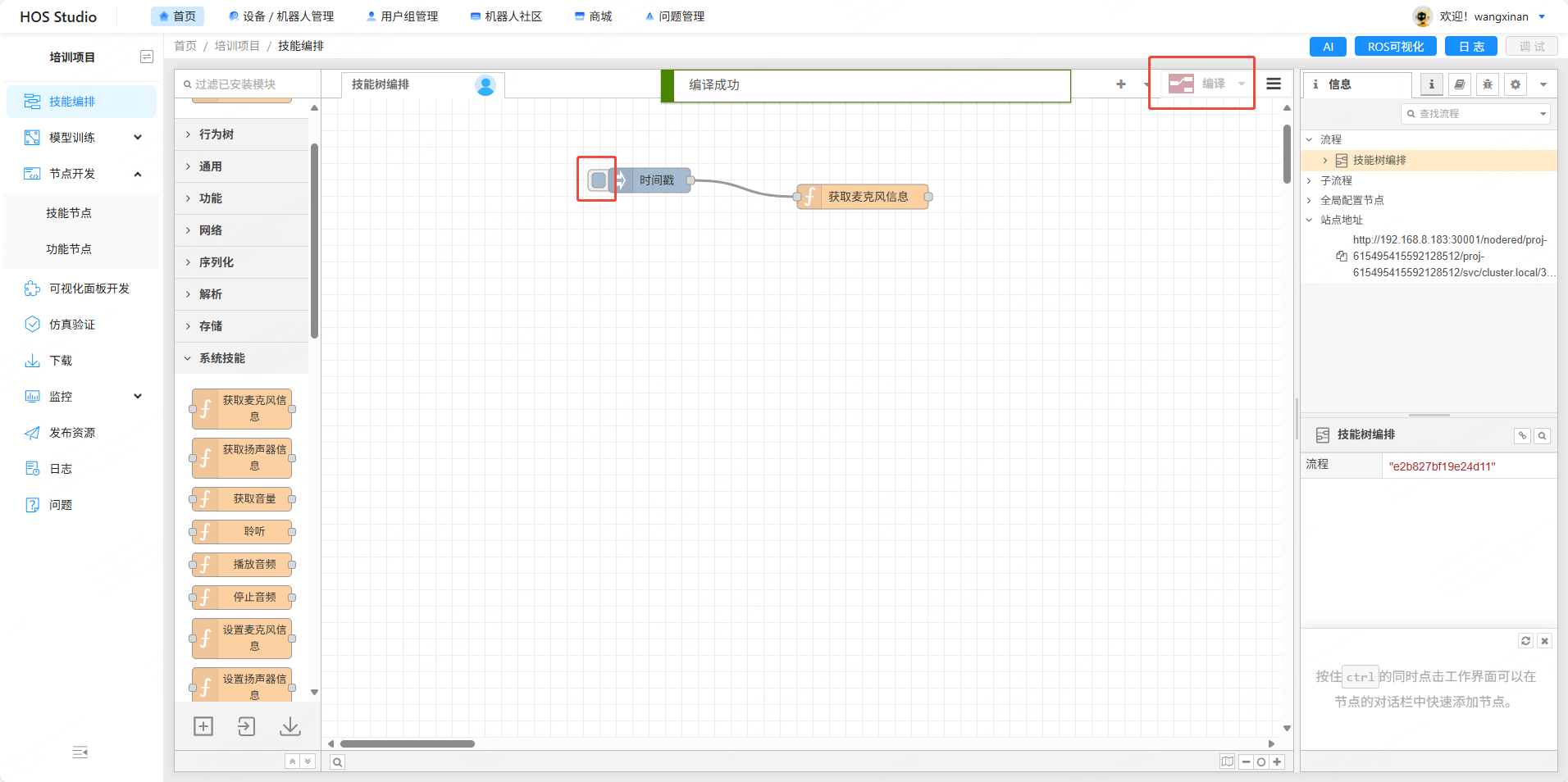
新建技能
现在我们来新建一个技能,订阅一个/chatter话题,数据类型为std_msgs/String,接收到消息后打印。 点击左侧功能栏节点开发->技能节点,点击“新建技能节点”按钮,输入名称和描述后等待技能创建完成: 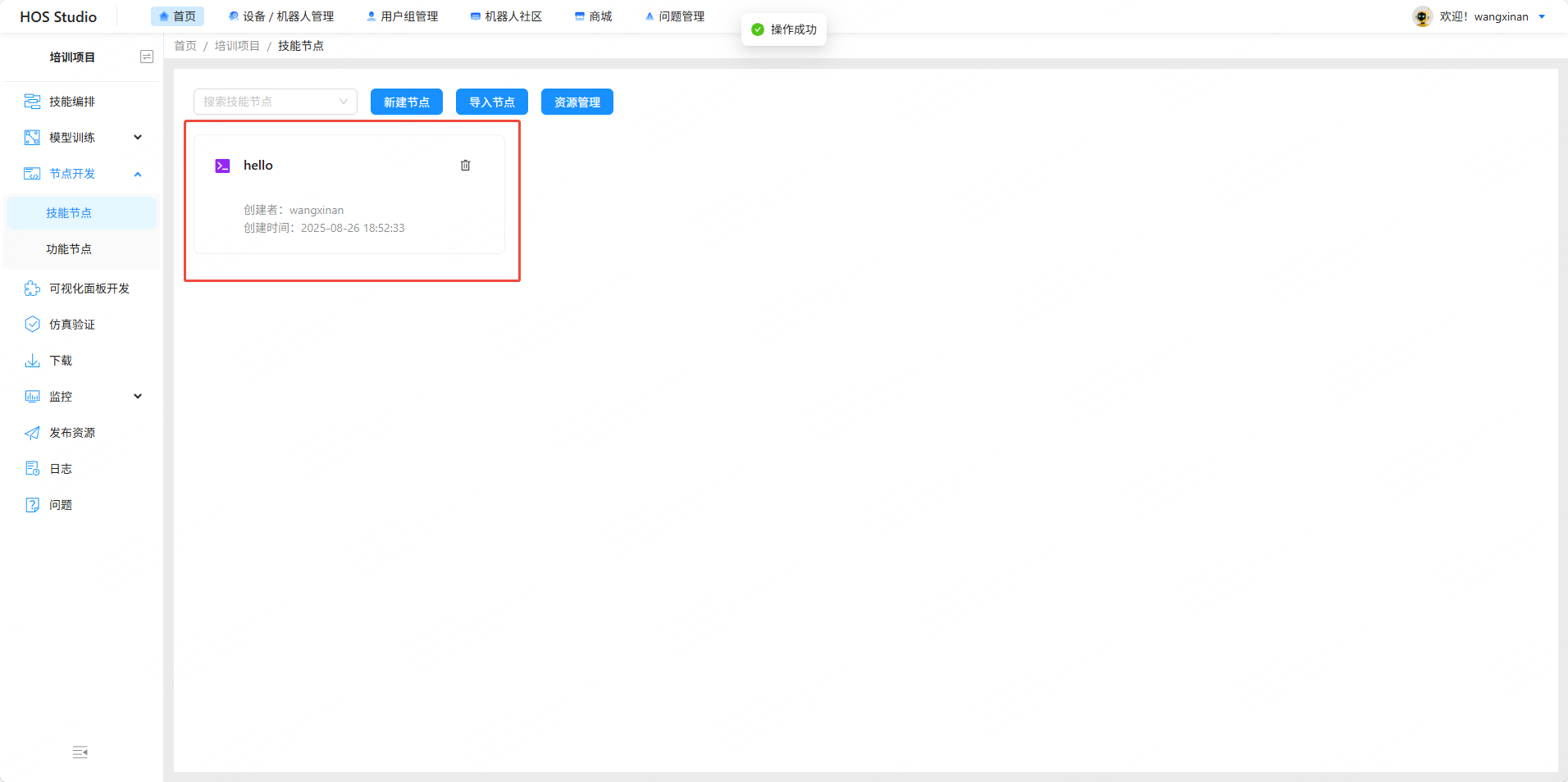 点击技能卡片进入技能开发环境,编写代码:
点击技能卡片进入技能开发环境,编写代码:
cd src && catkin_create_pkg helloworld rospy
touch helloworld/src/sub.py编辑sub.py文件:
使用新技能
为方便调试,在浏览器上新开一个tab页,复制当前tab页地址,在新的HOS平台网页中进入技能编排页面,左侧节点栏会出现刚才新建的技能对应的节点: