Appearance
单机大屏软件使用手册
基本介绍
领航者机器人大屏显示软件基于WEB技术开发,兼容全平台操作系统,包括但不限于Windows、Mac、IOS、IpadOS、Android、Linux系统等,使用者无需准备特定平台终端。
登入界面
打开终端浏览器,输入”机器人ip:8085”,即可打开机器人控制界面,机器人的IP地址一般贴于机器人躯干上,开发测试所使用浏览器是chrome,可优先选用; 如果机器人连接成功,会弹出如下界面: 
主界面元素介绍
- 界面左上角“展厅实时画面”,显示机器人头部摄像头所拍摄到的实时视频流
- 界面正上方“运动状态”栏,展示当前机器人的运动状态,该区域显示的信息内容可通过右下角设置菜单进行设置,目前可设置项目包括:运动状态,运行时间,运动速度,行进里程等项目;
- 画面正中间区域显示机器人正在执行的任务情况:包括当前机器人所在区域的地图,机器人的实时定位(橙色点),和机器人执行任务的路线和点位等信息;
- 界面正下方,展示了当前机器人全身的关节的pos信息,单位是rad;需要展示的关节数据可以通过有下面设置菜单进行勾选;
- 界面右侧是个机器人的三维孪生模型,能根据机器人当前的关节状态实时显示机器人的姿势;
- 机器人的左上方显示了机器人当前剩余电量信息,也可通过设置按键设置是否显示;
- 界面的右下侧是设置按键,点击弹出主界面的可选显示元素的配置界面
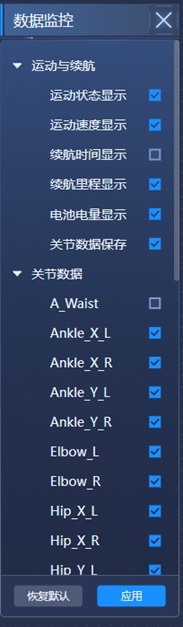
设置按键数据监控项目设置
点击右下设置按键,弹出如下数据监控设置项目菜单: 用户可根据显示需求勾选需要在主界面显示的元素,选择完成后,点击“应用”按键,设置方能生效;点击“恢复默认”则将放弃自定义显示设置;