Appearance
Navi机器人SDK开发指南
欢迎
这是浙江人形机器人Navi系列的SDK和编程指引文档站点。
📑 文档导航
本文档包含完整的开发指南和API接口文档,您可以通过滚动浏览所有内容。
- 概述 - 文档目的,SDK包含范围
- 快速开始 - 开机、网络配置、开发环境
- ROS API - 完整的服务(Service)和话题(Topic)接口
- Message Type - ROS API所需要用到的自定义数据类型
- 开发示例 - 展示如何通过实际代码调用API
- 调试开发工具 - 展示机器人开发过程中可能用到的调试工具
概述
文档目的
本 SDK 是专为浙江人形机器人创新中心推出的领航者 2 号(Navi02)人形机器人打造的 ROS1(Noetic)适配开发工具包。其核心目标是封装机器人底层接口(关节控制、定位导航、电源管理等),提供标准化的 ROS1 消息接口和工具集,降低开发者的二次开发门槛,支持快速搭建路径规划,手部操作等上层应用,使得机器人可以理解并执行操作者或开发者的指令意图,进而完成更为复杂的工作,和具身智能的使命。
机器人SDK包含范围:
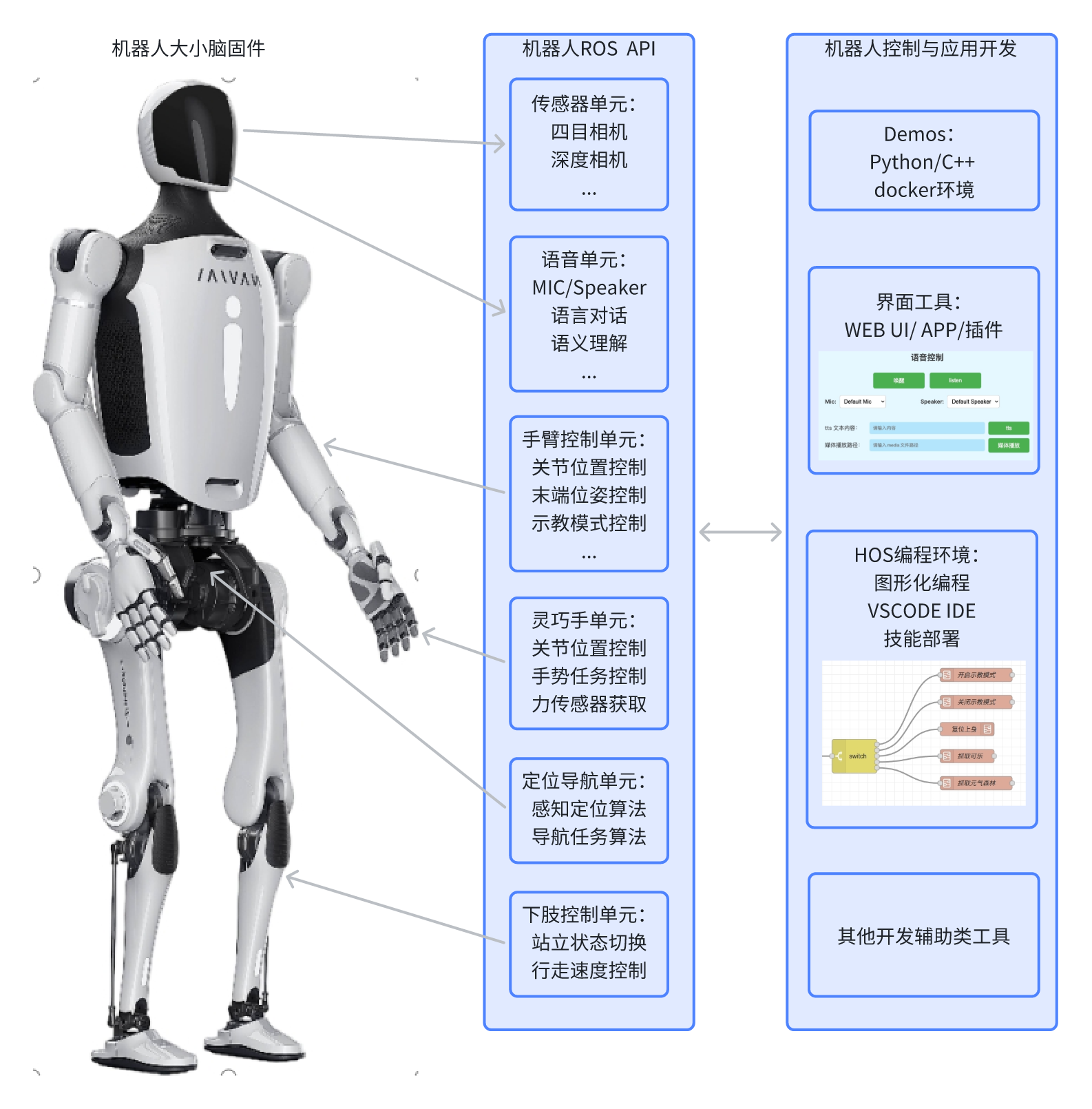
机器人应用开发SDK主要包含:
- 一组基于分布式消息中间件的API集合,我们当前采用的机器人领域采用最广泛的ROS消息中间件与其msg/ srv/等数据结构来描述我们机器人的内在能力;
- 基于上述接口,提供了基于C++/Python等语言编写的各种demos,给开发者提供编程示例以及说明文档,引导初次接触人形机器人的开发人员;
- 除了编程语言,我们同时提供了各种界面化的示教器等调试工具,方便客户通过UI完成机器人的较为简单的控制和调试需求;
- 我们同时提供了机器人的图形化编程界面HOS,简化机器人开发时的环境配置和api调用逻辑,让开发者可以专注于自身的业务与算法开发,加快机器人应用开发和部署的步骤;
机器人SDK层级图:
开发环境
- 操作系统:Ubuntu 20.04(ROS Noetic)
- ROS版本:ROS1 Noetic
- 支持语言:Python3.x,C++17及以上
- 硬件兼容:支持领航者 2 号(Navi02)人形机器人,WA1/WA2轮臂机器人,半身机器人
- 适用场景:第三方应用集成,二次开发,机器人导航、操作、行走等功能的快速部署
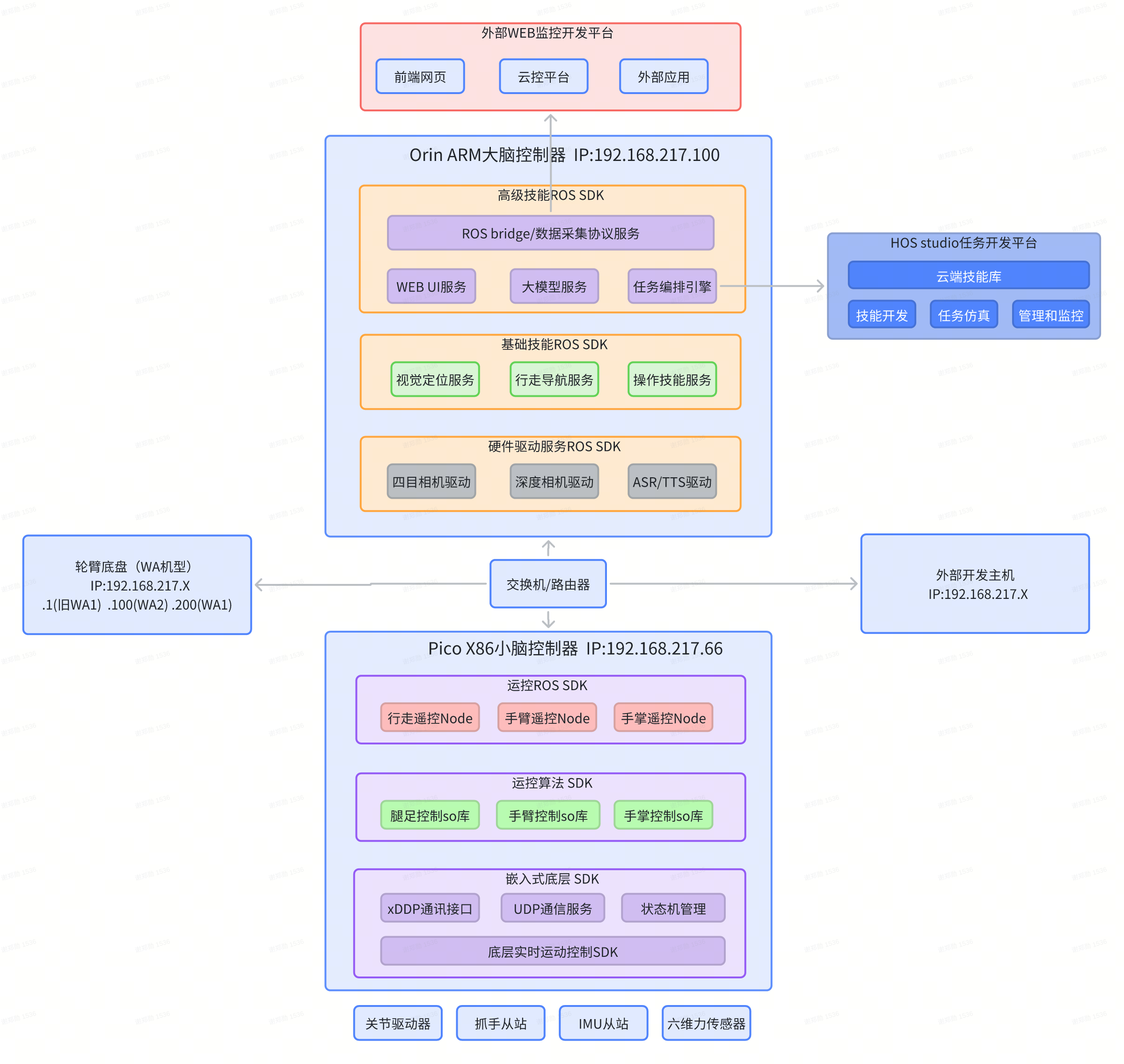
系统框架
机器人采用大脑+小脑的双控制器控制,并提供了多样的开发方式,详见 终端连接
机器人内部软件框图
快速开始
开机
开机键
机器人没有单独的开关机按键,给机器上电后,机器人进入开机状态;
- 对于双足全身型(I2)的机器人而言,打开机器人背后的电池包上的电源开关即可;
- 对于半身型机器人(U1),将底盘引出的插头插入220V电源插板即可;
- 对于轮臂型机器人(WA1),需要长按轮式底盘上的电源开关;
开机状态指示
启动开机流程后,首先机器人内部的控制器将进入系统的boot状态,开始启动大小脑的Linux系统; 机器人开机后,将通过语音和面部显示器指示当前机器人的启动状态; 启动时序如下(以全身型机器人为例): 机器人上电后,内部的SDK开始自主bringup,全身关节会处于归位过程,并处于僵直状态,此时机器人无法自主保持站立,因此确保上电后机器人仍处于安全状态; 小脑SDK启动完成后,需在确保机器人脚掌触地状态下,可通过语音,遥控等方式命令机器人站立后执行后续指令(轮臂款机器人无此限制); SDK启动时序(时间未准确标定): 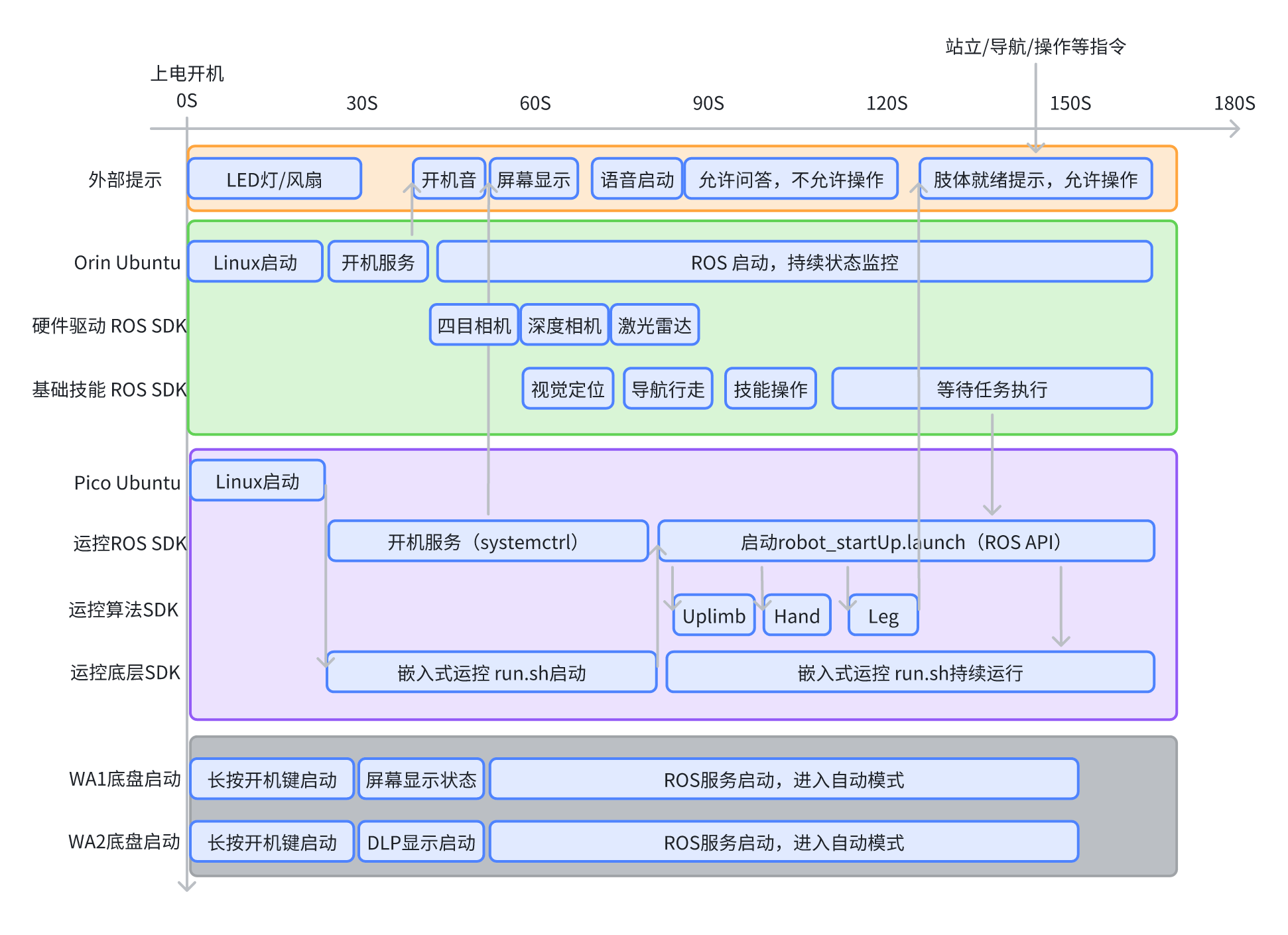
网络与连接
在新的环境中,初次启动机器人,需要确定机器是否已经联网,在没有联网的状态下,部分机器人的功能将无法使用; 建议使用显示器+键鼠登入到orin进行联网设置;
使用显示器和键鼠
使用USB键鼠和DP线连到机器人orin大脑之后,按照Ubuntu系统的方式使机器人连上用户的wifi, 并将大脑orin 设置为固定IP,避免经常更换;
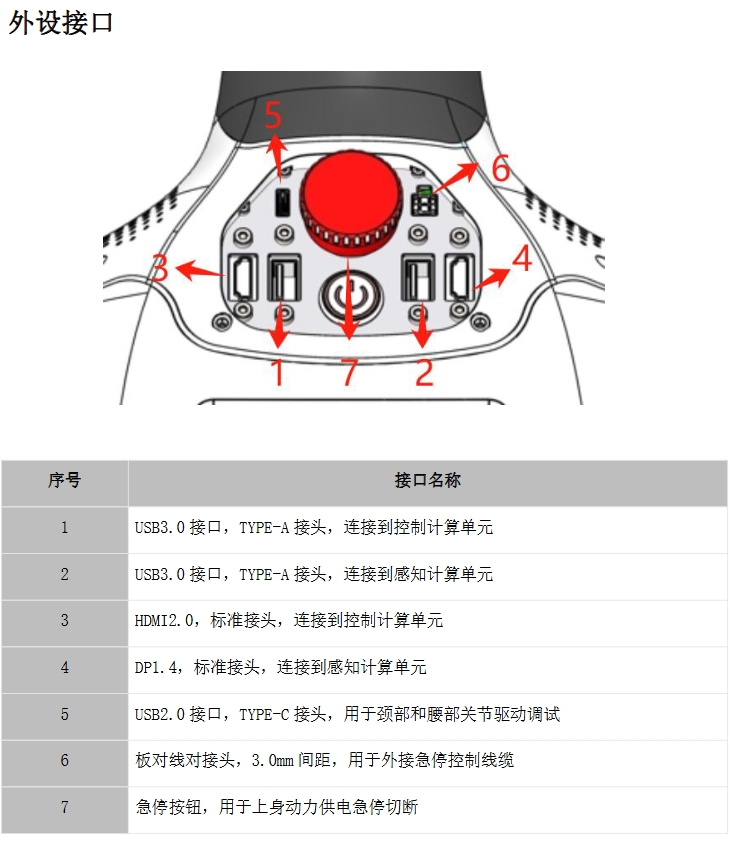
全身/半身型外设接口
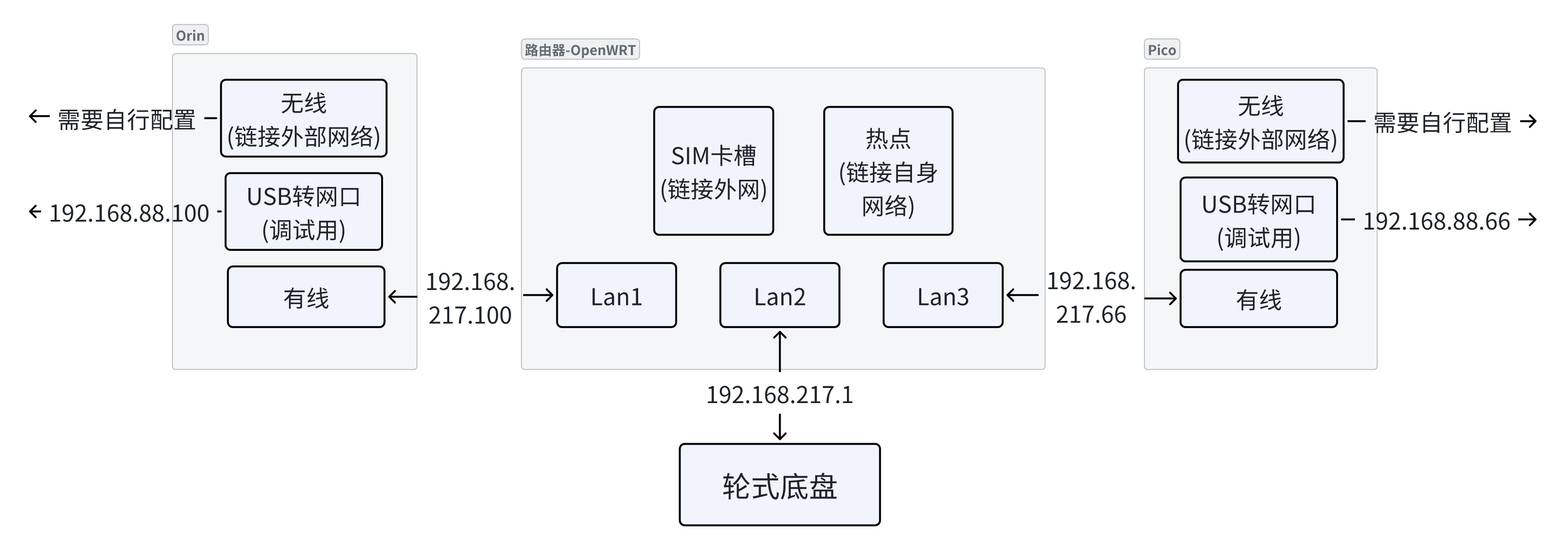
轮臂型外设接口

轮臂型网络拓扑
使用机器人AP热点
对于不方便接USB键鼠和HDMI屏幕的场景,也可以通过连接机器人自身的AP热点来配置机器人的网络; 机器人大脑默认的AP名称前缀为nav01ap的Wi-Fi,此Wi-Fi就是机器人大脑的AP热点,密码为88888888。
终端连接
完成机器人的网络配置之后,对于开发者而言,可能还需要使用终端登入大脑系统,支持如下方式登入:
- Linux系统内终端:如果已经使用USB和HDMI登入orin,可以直接使用Linux系统终端登入;
- 外部终端登入Linux:通过标准ssh协议登入orin Linux系统,ssh端口是22;
- 登入到demos容器:
开发
对于开发者,需要机器人完成更复杂任务时,我们提供了ROS开发以及基于ROS API的HOS图形化编程; ROS API列表参考下一章节;
开发环境配置
在开发环境中安装zj_humanoid_types_25_R3.run,就可以使用我们机器人api的数据结构了; 数据结构内容,请查阅:zj_humanoid_types
Help:
./zj_humanoid_types_25_R3.run # Install all .deb files in the current directory
./zj_humanoid_types_25_R3.run -- --uninstall # Uninstall all .deb files in the current directory
./zj_humanoid_types_25_R3.run -- --version # Show verison
./zj_humanoid_types_25_R3.run -- --changelog # Show changelog
./zj_humanoid_types_25_R3.run -- --help # Show the help infoROS Python/C++
我们提供了标准的ROS编程环境,帮助开发者快速的启动开发;demos可参考demos
HOS开发
我们提供了HOS的图形化编程界面,帮助开发者更便捷的调用机器人的API接口,更便捷调试部署等工具,使得开发者可以专注于自身的逻辑开发; 详细说明请参与HOS开发
常见问题和解决方法
1. 开机没有语音播报"机器人大脑启动成功"
该语音指示了机器人与远程服务器的连接状态,如果开机没有播报启动成功,需要确认网络连接状态;
2. 机器人启动后无法调用肢体动作
需要确认急停按键是否被按下,或者电机是否有损坏;