Appearance
Navi机器人SDK开发指南
这是浙江人形机器人Navi系列的SDK和编程指引文档站点。
快速开始
1. 开机
1.1 开机键
机器人没有单独的开关机按键,给机器上电后,机器人进入开机状态;
- 对于双足全身型(i2)的机器人而言,打开机器人背后的电池包上的电源开关即可;
- 对于半身型机器人(),将底盘引出的插头插入220V电源插板即可;
- 对于轮臂型机器人(wa1),需要长按轮式底盘上的电源开关;
1.2 开机状态指示
启动开机流程后,首先机器人内部的控制器将进入系统的boot状态,开始启动大小脑的Linux系统;
机器人开机后,将通过语音和面部显示器指示当前机器人的启动状态;
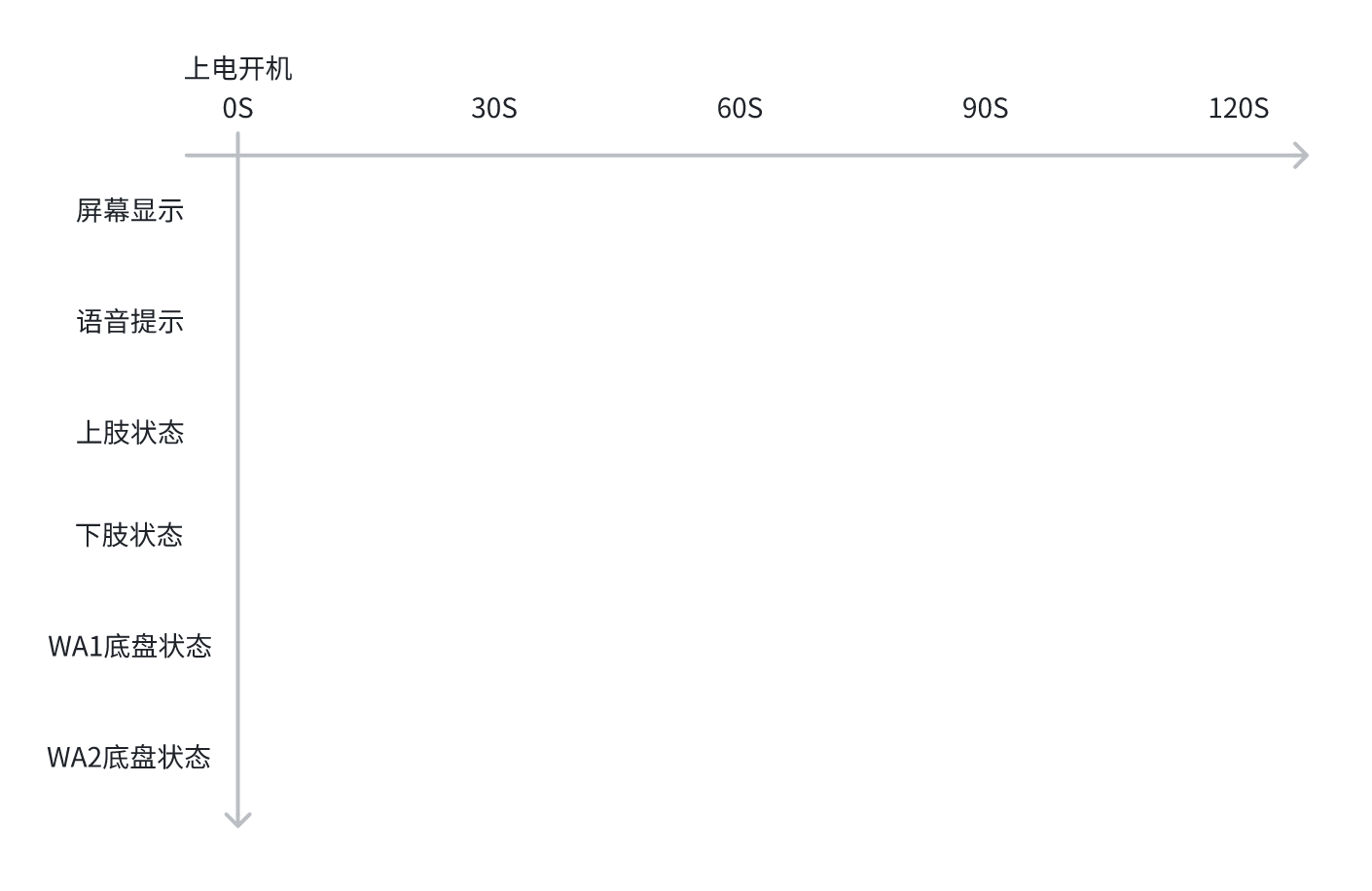
启动时序如下(以全身型机器人为例):
机器人上电后,内部的SDK开始自主bringup,全身关节会处于归位过程,并处于僵直状态,此时机器人无法自主保持站立,因此确保上电后机器人仍处于安全状态;
小脑SDK启动完成后,需在确保机器人脚掌触地状态下,可通过语音,遥控等方式命令机器人站立后执行后续指令(轮臂款机器人无此限制);
SDK启动时序(时间未准确标定):
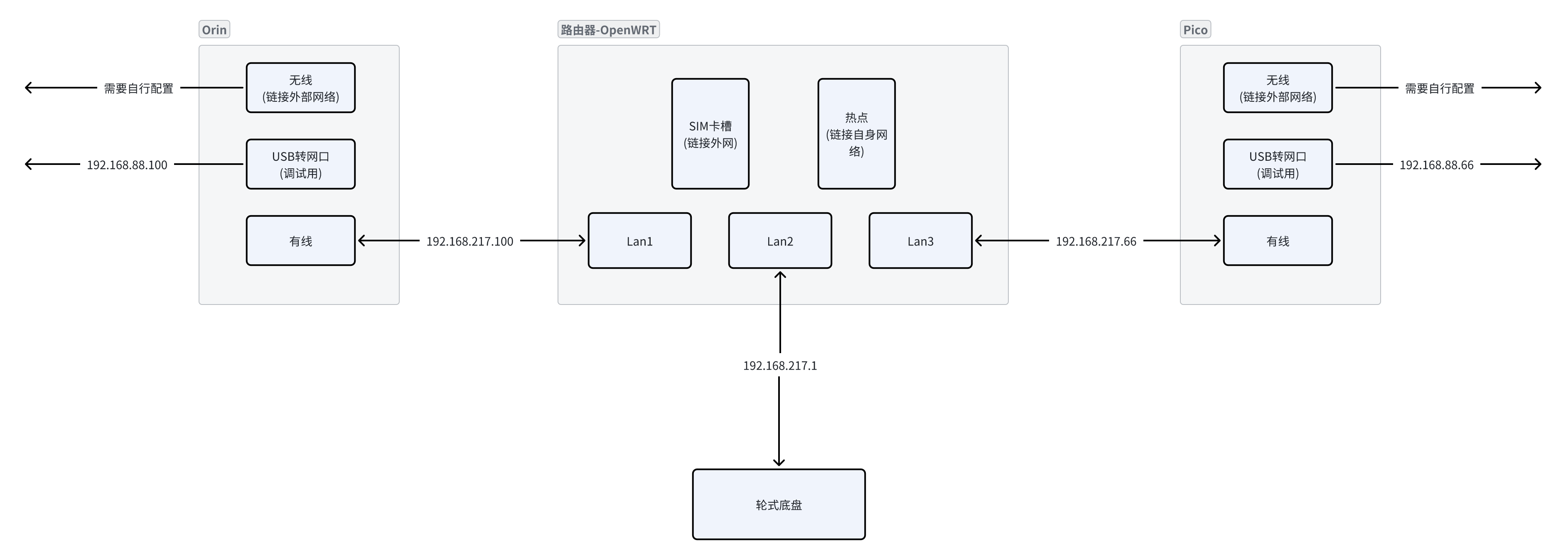
2. 网络与连接
在新的环境中,初次启动机器人,需要确定机器是否已经联网,在没有联网的状态下,部分机器人的功能将无法使用;
2.1 使用显示器和键鼠
使用USB键鼠和HDMI线连到机器人orin大脑之后,按照Ubuntu系统的方式使机器人连上用户的wifi;
全身/半身型外设接口
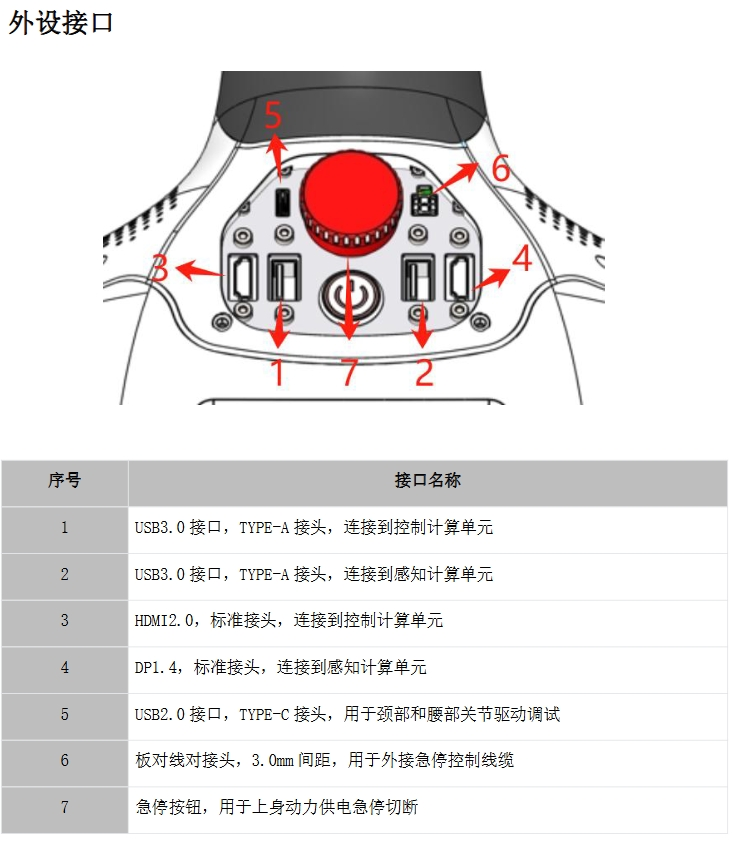
轮臂型外设接口
2.2 使用机器人AP热点
对于不方便接USB键鼠和HDMI屏幕的场景,也可以通过连接机器人自身的AP热点来配置机器人的网络;
机器人大脑默认的AP名称前缀为nav01ap的Wi-Fi,此Wi-Fi就是机器人大脑的AP热点,密码为88888888。
2.3 终端连接
完成机器人的网络配置之后,对于开发者而言,可能还需要使用终端登入大脑系统,支持如下方式登入:
- Linux系统内终端:如果已经使用USB和HDMI登入orin,可以直接使用Linux系统终端登入;
- 外部终端登入Linux:通过标准ssh协议登入orin Linux系统,ssh端口是22;
- 登入到demos容器:
- 在Linux终端内,支持使用docker exec -it navi_project-demos-1 bash
- 外部终端,可通过ssh协议登入demos,指令:ssh root@ip -p 2222,密码:naviai@2025
3. 开发
对于开发者,需要机器人完成更复杂任务时,我们提供了ROS开发以及基于ROS API的HOS图形化编程; ROS API列表参考下一章节;
3.1 ROS Python/C++
我们提供了标准的ROS编程环境,帮助开发者快速的启动开发;
3.2 HOS开发
我们提供了HOS的图形化编程界面,帮助开发者更便捷的调用机器人的API接口,更便捷调试部署等工具,使得开发者可以专注于自身的逻辑开发;